El robot se desplaza gracias a dos motores eléctricos (independientes) y es capaz de detecta los bordes de una mesa (mediante sensores infrarrojos) y obstáculos (mediante finales de carrera).
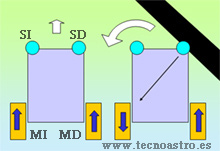
Cuando el robot llega a un borde o detectar un obstáculo, cambia el sentido de giro del motor del lado opuesto del sensor, esto hace que el robot gire sobre sí mismo durante un tiempo, y trascurrido ese tiempo el robotreanuda su marcha hacia adelante.
El circuito es alimentado con una pila de 6v, y cuenta con un diodo led, que indica que se ha establecido la alimentación eléctrica. Al detectar un borde o un obstáculo los sensores hacen que se descargue el condensador instantáneamente, lo que provoca que la tensión de base-emisor del transistor sean menor a 0,7 V, el transistor pasa a corte, el relé se desactiva, y el motor del lado opuesto al sensor invierte el giro, hasta que transcurrido un corto periodo de tiempo se vuelve a cargar el condensador, entonces la tensión base-emisor del transistor se hace mayor de 0,7 V, el transistor se satura, el relé se activa, y el motor vuelve a girar hacia adelante.
La función del condensador es la de mantener el giro del motor hacia atrás durante un tiempo con objeto de que el robot se retire del obstáculo o borde. |